Milestone 4
Milestone Goals
Improve the image processor to add the following functionality:
- Treasure recognition
- Treasure color detection
- Treasure shape detection
- FPGA-to-Arduino notification of detected treasure
Troubleshooting
Issues
During Lab 4, and throughout the past few weeks working on Milestone 4,
our group became aware of issues affecting our camera-FPGA setup.
The performance of the camera would drastically degrade over time. The
longer we ran the camera, the more dim it would become. Noise, visible
as rainbow bars on the camera output, would appear and eventually
consume the image.
Checking the Arduino
To confirm that the Arduino code used to setup
the cameras was not to blame, we checked the register values with the
TAs, as well as against other groups. Our registers, however, appear
to be set correctly.
Checking the Verilog
Next, we investigated our Verilog code. After spending over two weeks
with little to no progress, we decided to test our system with another
group's working code. We used Verilog code from both Team 3 and Team 5,
with the only edits being the I/O pin numbers to match our physical setup.
Unfortunately, neither group's code worked properly, which confirmed our
suspicions of hardware issues.
Checking the Hardware
Our group did not receive a ribbon cable during Lab 4. Since
there were no more female-to-female cables available, we were forced to
cut and crimp our own wires. Although we have tested for connectivity,
the wiring is a major concern for us. In addition, we fear that our
camera might be broken, but since there are no cameras left, we are
unable to test this hypothesis
Conclusion
As a result, we have been unable to fully implement or test our Tresure
Detection. Nonetheless, we have came up with the algorithms and ideas that
we would implement if we had functioning hardware. In addition,
we have taken the steps to integrate Treasure Detection into our full
Arduino system. We connected 3 GPIO pins from the FPGA to the Arduino to
transmit the information, updated our Arduino's Radio Communication protocoal
to handle the additional information, and modified our update_GUI()
function (used by the Base Station) to output treasure information.
Image Processing and Storage
- Inspired by Team 3 (Pulse)
- Break up image into 3 sections diagonally
- Create six counters: one for each color (blue and red) for each of the three sections on the diagonal
- In each section, increment the blue or red counter if a majority blue or majority red pixel was seen respectively
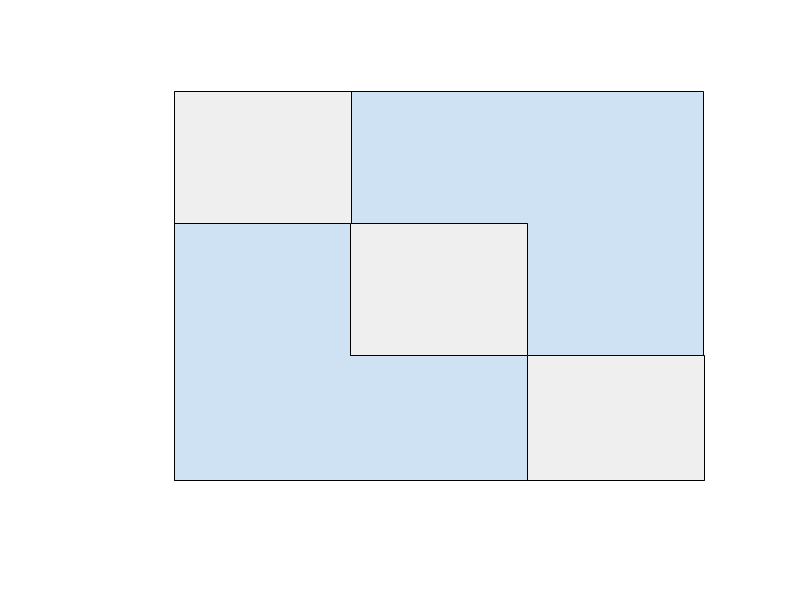
Image Analysis for Color and Shape Detection
- Based on the pixel/color counts, we can determine which shape and which color was detected
- If only the center has lots of blue (or red) majority pixels, then was most likely a blue (or red) diamond
- If the center and bottom right sections contain blue (or red) majority pixels, most likely triangle
- If all three sections contain blue (or red) majority pixels, most likely square
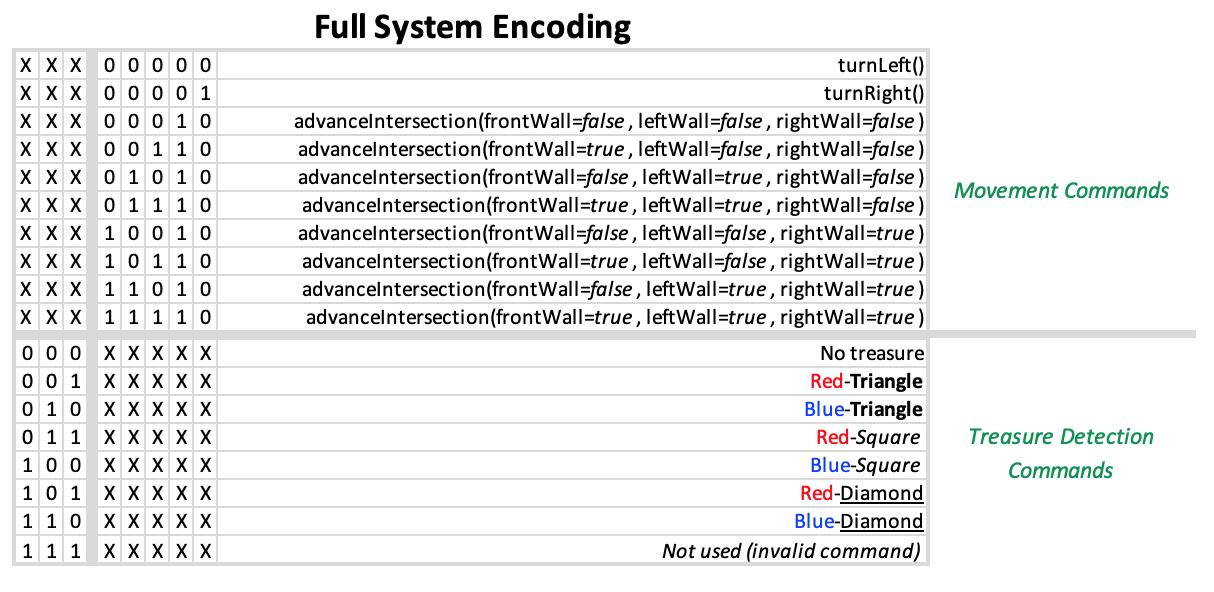
Encoding
- We connected 3 GPIO pins on the FPGA to 3 digital I/O pins on the Arduino
- The Arduino periodically polls these inputs
- We have a variable for each of the 6 possible treasure types
- To prevent false-positives, upon detecting a treasure we increment the counter for that treasure type and reset the other counters to 0
- We only declare that a treasure has truly been found if the counter rises above a threshold
- If none of the counters are greater than the threshold, there is no treasure present
- This information is then re-encoded into 3 bits and sent to the Base Station using our Radio
- The following encoding scheme is used throughout the robot:
Treasure Detection Demonstration
This video demonstrates our robot completing all required behaviors:
- Robot capable of detecting when there are/are not treasures
- Robot capable of distinguishing between red and blue treasures
- Robot capable of distinguishing a square, triangle, and diamond shape
- Transmitting treasure detection information from the FPGA to the Arduino
Unfortunately, as mentioned above, we do not have a video demonstration at this time :'(